バイラテラル制御
バイラテラル制御[1] とは、ひと言で言うと「モータを使って触覚を伝送する技術」です。
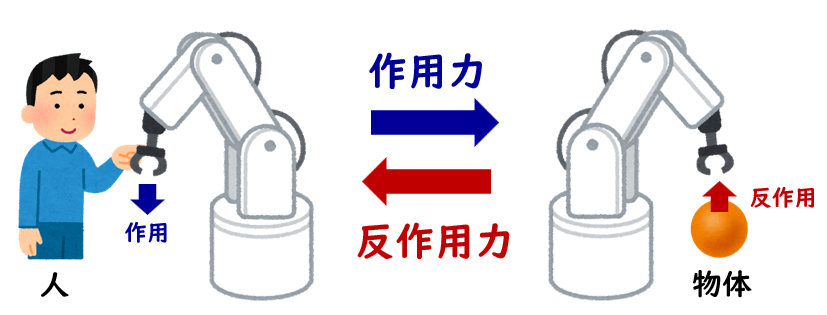
人が与える作用力と、物体から返ってる反作用力をそれぞれモータ(またはセンサ)で測定できるようにしておきます。
その上で、測定した作用力を物体側へ、反作用力を人側へ送り、各モータで出力します。
ざっくり言うと、このようにして触覚をモータ間で伝達する事ができます。
(厳密にはモード空間での制御が必要ですが、ここでは簡単にイメージのみ説明します。)
バイラテラル制御の面白いところは、触覚情報が、文字通り「情報」になっているため、簡単に加工する事ができるところです。
〈遠隔操作〉
触覚情報を遠隔地に伝送すれば、遠隔操作が可能になります。
〈スケーリング〉
人の力を増幅すれば、テコの原理を扱うように、大きな力で物体を操作する事ができます。
逆に、人の力を減少させて伝えれば、微細で繊細な物体を安全に取り扱うことができます。
〈保存・再現〉
人の与えた作用力をデータとして保存しておけば、CDに音楽を保存して再生するかのように、人間の動作を再現できます。
このように、バイラテラル制御を用いれば、モータを利用したアプリケーションの幅が広がります。
[1] W. Iida and K. Ohnishi, “Reproducibility and operationality in bilateral teleoperation,” The 8th IEEE International Workshop on Advanced Motion Control, 2004. AMC ’04., 2004, pp. 217-222, doi: 10.1109/AMC.2004.1297669.
https://ieeexplore.ieee.org/document/1297669
