OpenCVとPythonで硬貨を検出してみた
OpenCVをPythonで走らせてコインの認識を行ってみました。
まずはカメラの映像をライブでウィンドウにキャプチャします。
Python
import cv2
# カメラを開く
cap = cv2.VideoCapture(1)
while True:
# 画像をキャプチャする
ret, frame = cap.read() #カメラ動画
# 画像の表示
cv2.imshow("Image", frame)
# `q`キーを押すとループを終了する
if cv2.waitKey(1) == ord('q'):
break
# カメラを閉じる
cap.release()
# すべてのウィンドウを閉じる
cv2.destroyAllWindows()実行結果がこちら↓↓

接続するカメラが違う場合は、4行目の関数の閾値の数字を変えてみてください。これでUSBカメラの映像をライブで取り込めるようになりました。
次に Hough 関数を使って円を検出してみます。
Python
import cv2
import numpy as np
# カメラを開く
cap = cv2.VideoCapture(1)
#フォントの指定
fontType = cv2.FONT_HERSHEY_DUPLEX
while True:
# 画像をキャプチャする
ret, frame = cap.read() #カメラ動画
# グレースケール画像の生成
image_gray = cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)
#==============================================
# Cannyでエッジ検出処理
canny_gray = cv2.Canny(image_gray,100,200)
cimg = canny_gray
j = 0
# hough関数
circles = cv2.HoughCircles(cimg, cv2.HOUGH_GRADIENT, 1, 20, param1 = 120, param2 = 15, minRadius = 10,maxRadius = 30)
# param1 : canny()エッジ検出器に渡される2つの閾値のうち、大きいほうの閾値0
# param2 : 円の中心を検出する際の投票数の閾値。小さくなるほど、誤検出が起こる可能性がある。
# minRadius : 検出する円の最小値
# maxRadius : 検出する円の最大値
#検出された際に動くようにする。
if circles is not None and len(circles) > 0:
#型をfloat32からunit16に変更。
circles = np.uint16(np.around(circles))
for i in circles[0,:]:
# 外側の円を描く
cv2.circle(frame,(i[0], i[1]), i[2], (0, 191, 255), 2)
# 中心の円を描く
cv2.circle(frame,(i[0], i[1]), 2, (255, 255, 0), 2)
# 円の数を数える
j = j + 1
#円の合計数を表示
cv2.putText(frame,'Total :'+str(j), (30,30), fontType, 1, (0, 0, 0), 1, cv2.LINE_AA)
#==============================================
# 画像の表示
cv2.imshow("Image", frame)
# `s`キーを押すと画像を保存する
if cv2.waitKey(1) == ord('s'):
#結果の書き込み
cv2.imwrite('image1.jpg',frame)
# `q`キーを押すとループを終了する
if cv2.waitKey(1) == ord('q'):
break
# カメラを閉じる
cap.release()
# すべてのウィンドウを閉じる
cv2.destroyAllWindows()実行結果がこちら↓↓
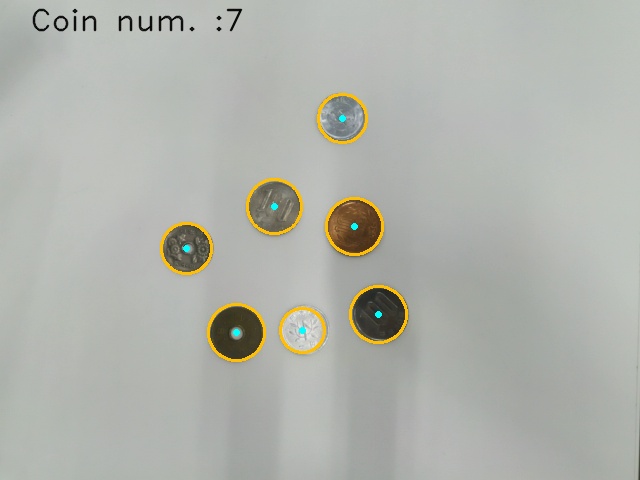
これで円形状のものを検出し、数をカウントできるようになりました。