自動水あげ機を作ってみた
室内で観葉植物に自動で水をあげる装置を作ってみました。
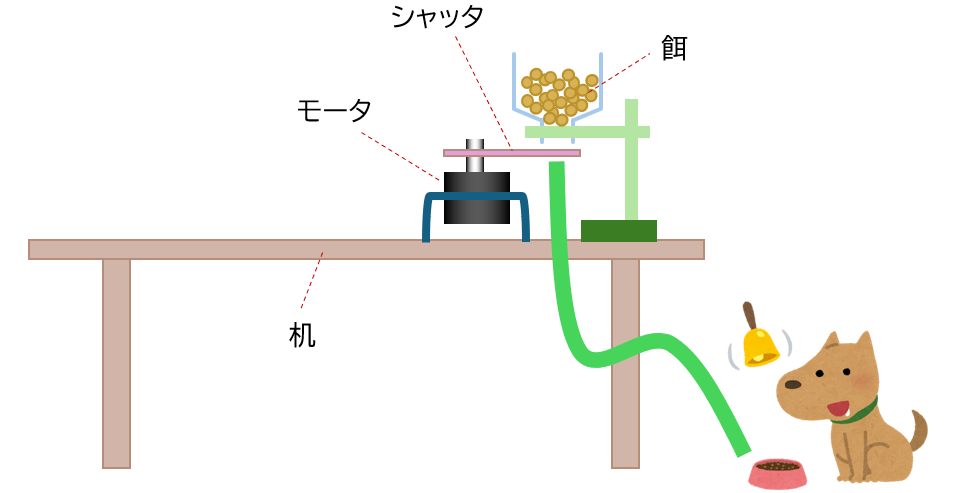
構想は以下のようになっています
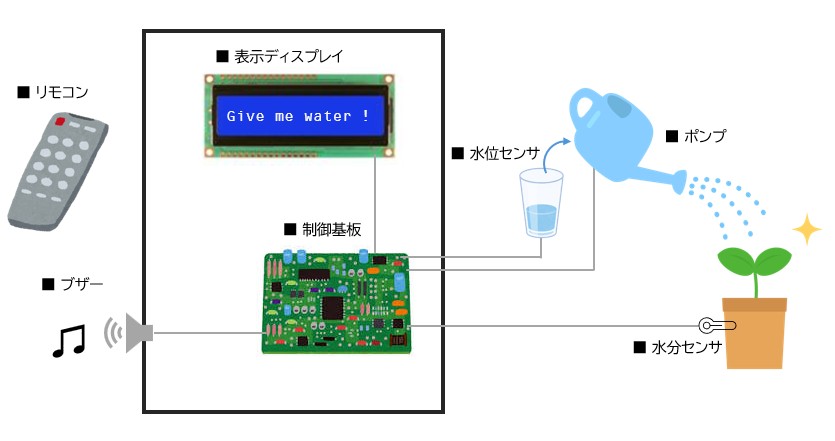
水分センサが鉢の水分量を検知して、一定の値以下になったらポンプが作動して水をあげてくれます。
ポンプはAmazonでこちらを購入
https://www.amazon.co.jp/dp/B07VKSTF78?ref=ppx_yo2ov_dt_b_fed_asin_title
自動水やり装置 DIYキット 静電容量式土壌水分センサー + 小型ポンプ
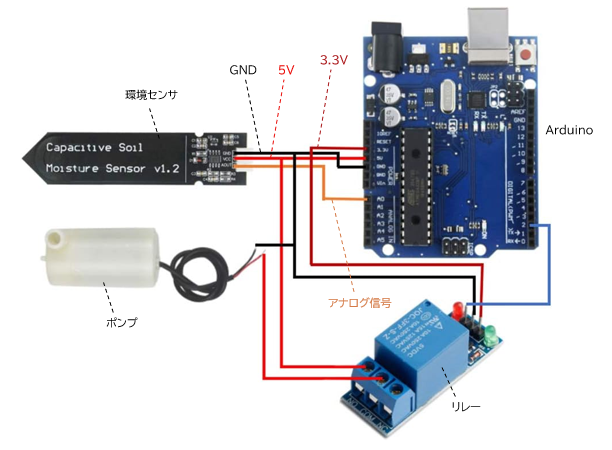
ポンプ・センサを配線する
まずはポンプとセンサを配線します。
ポンプは少し大きな電力が必要なため、リレーを介してON/OFします。
制御プログラムを作る
// アナログ入力ピン
const int analogPin = A0;
// デジタル出力ピン
const int digitalPin = 2;
// しきい値(ADCの半分)
const int threshold = 450;
int cnt = 0;
void setup() {
pinMode(digitalPin, OUTPUT);
Serial.begin(9600);
}
void loop() {
// A0の値取得(0~1023)
int sensorValue = analogRead(analogPin);
// 出力判定
bool outputState = false;
if (sensorValue < threshold) {
digitalWrite(digitalPin, HIGH);
outputState = true;
cnt = 0;
} else {
digitalWrite(digitalPin, LOW);
outputState = false;
cnt++;
}
// シリアル表示
Serial.print(" , A0 = ");
Serial.print(sensorValue);
Serial.print(" , D2 = ");
Serial.println(outputState ? "HIGH" : "LOW");
Serial.print("cnt = ");
Serial.print(cnt);
delay(150);
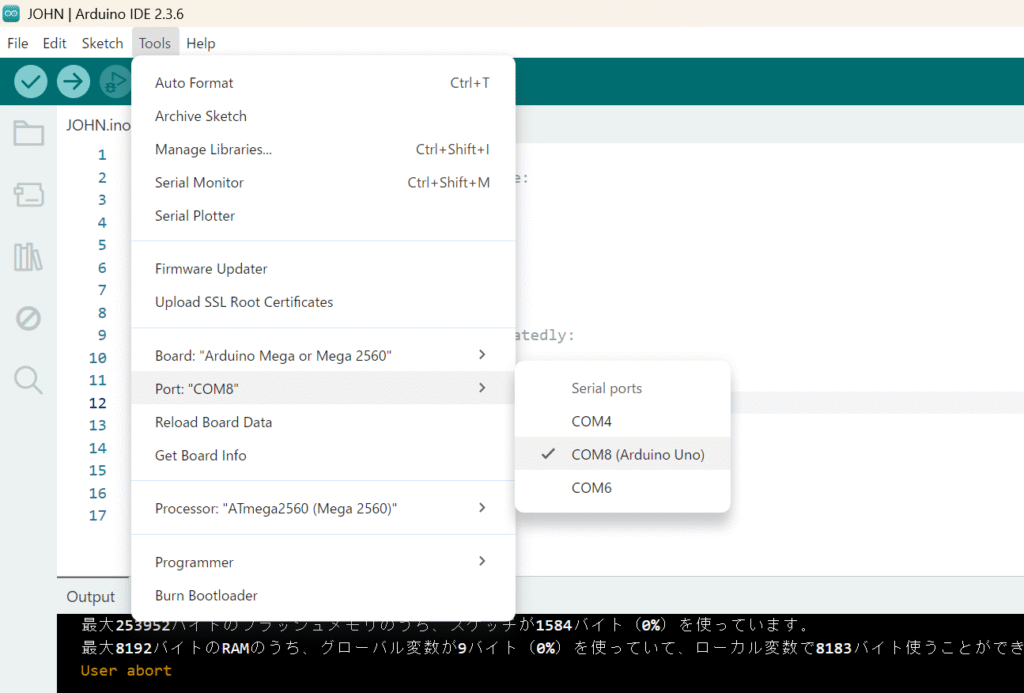
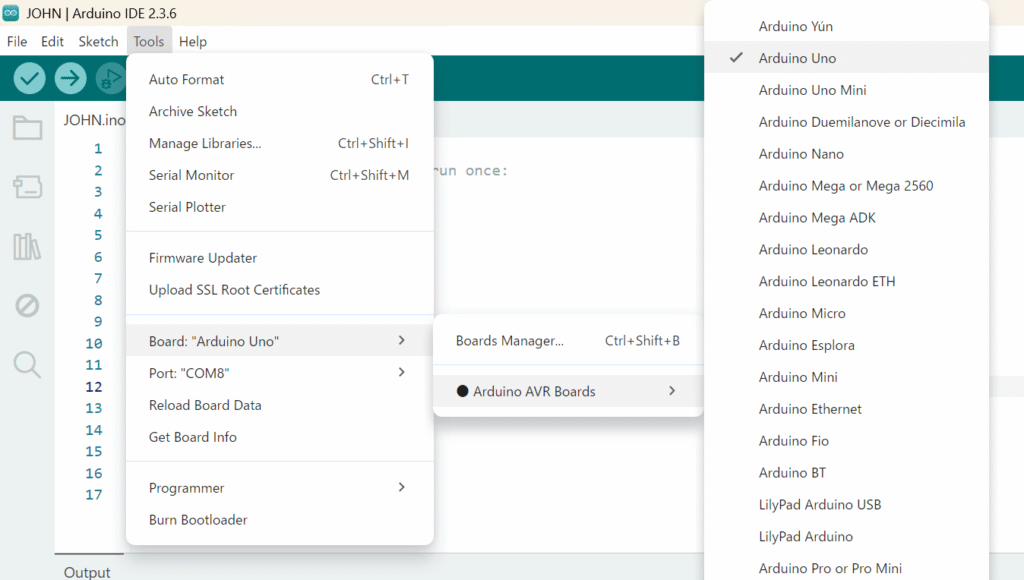
}上記のプログラムを転送します。
450の値をしきい値にポンプがON/OFFするようになります。
環境センサの値はArduinoの「シリアルモニタ」から確認できます。
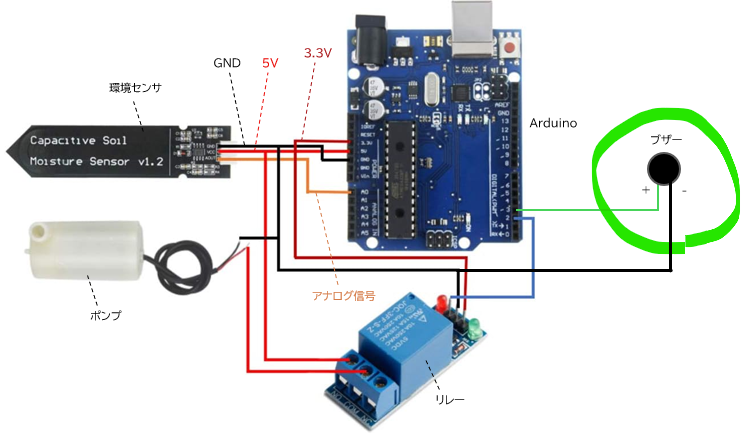
ブザーを追加する
つぎに水をあげているときに音楽をならせるよう、ブザーを追加します。
配線は以下です。
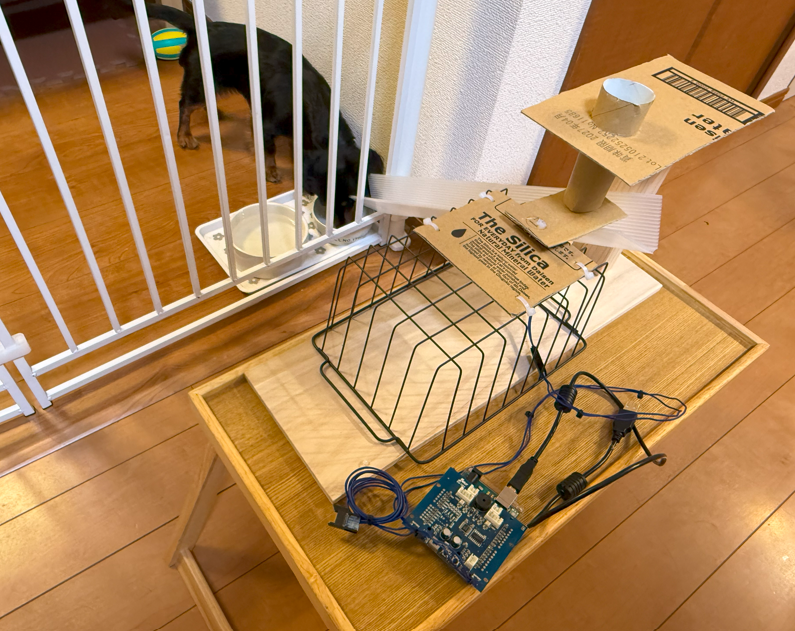
完成した作品